Innovations
Automated Crayfish Feeder
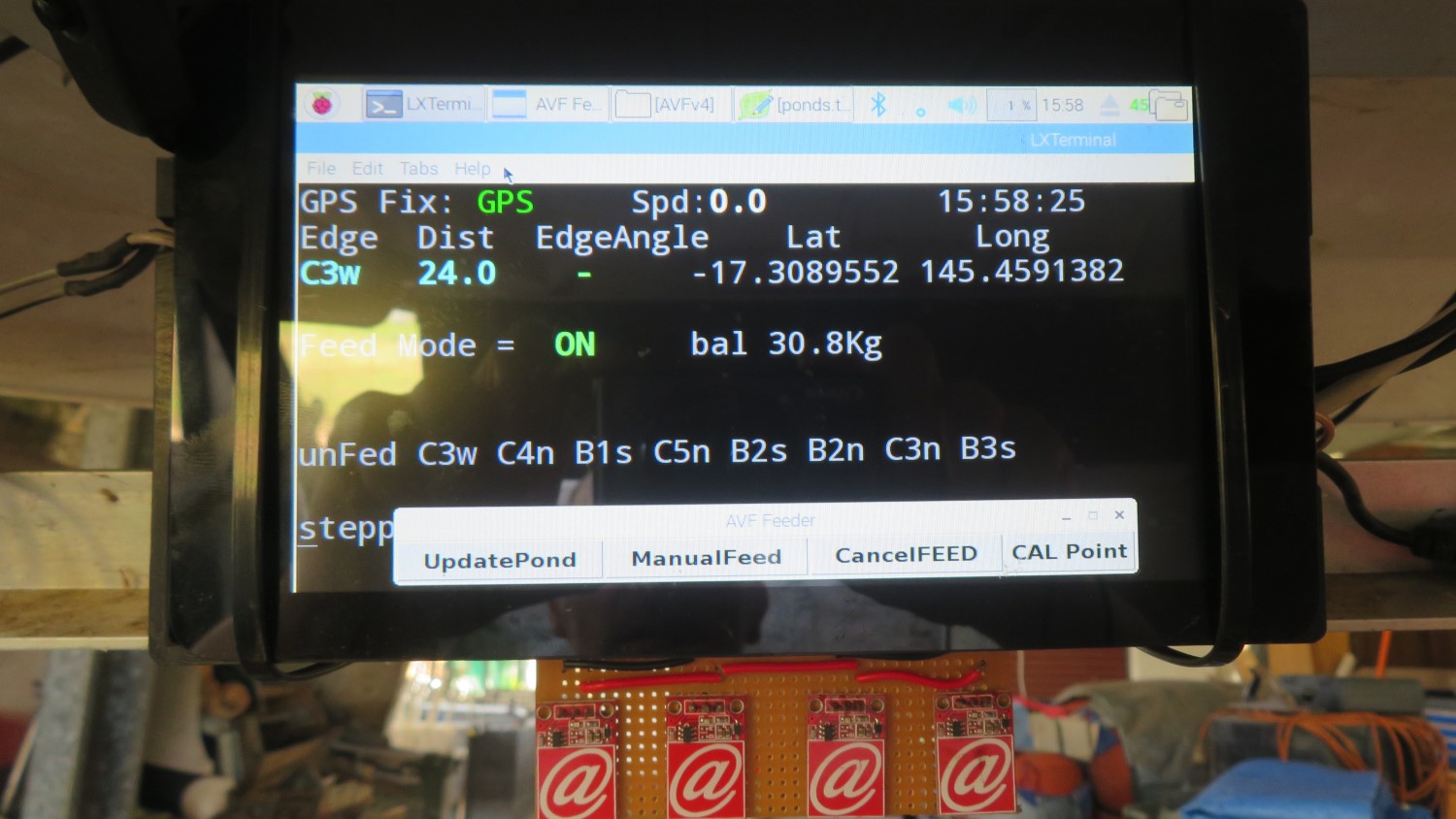
It used to take us nearly two hours each day to feed our farm by hand; walking around in the hot sun or rain with heavy buckets. There has got to be a better way! Some great input from Bill Keast formally from Ironbark Redclaw lead us to utilising an electric golf buggy, a Raspberry Pi (look it up) a GPS module, a stepper motor, an electric powered feed accelerator/spinner (custom built) and some Python programming code to make an automated redclaw crayfish feeder.
Basically, we defined a digital model of our farm by using a RTK GPS to define waypoints with centimetre accuracy. By simply driving around the farm the Pi can calculate our position, direction and speed to determine which pond side we are currently next to. It utilises look-up tables to determine if and how much to feed this side of a pond. The stepper motor is used to control the amount of feed into the spinning feed accelerator to distribute feed into the pond. Simple, right? Well not exactly, apart from the engineering it’s a surprisingly complex logic problem to solve. But we are pretty much there. I say “pretty much there” because you never actually finish a project like this, you always keep finding new refinements and features to add and even more difficult, to find the time to implement them.
The next big step would be to make the feeder driverless, basically a robotic feeder. Don’t know if we have the skills to do that, but if we are going to then I’ll need to work with Bill to make that happen. And, to be honest, I don’t know how useful a fully automated driverless feeder would really be (probably more trouble than it’s worth); but you have to admit, it would be pretty cool!